 |
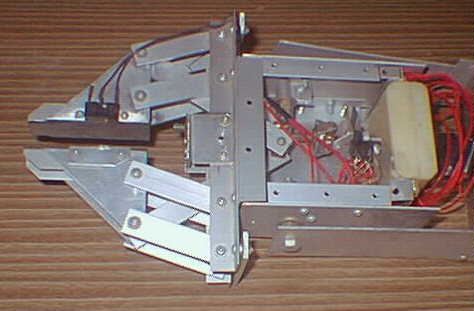
試作品 この試作品は、1986年頃コンピュータ制御で動く ”機械の腕”が欲しくてチャレンジした時の物で、 一応 実用を目標に製作を開始。 ところが、実際に作り始めてみると部品の加工技術も無かった為 各部のガタは多いし 速度は遅いし 重量もかなり重く まともに動きそうに無かったので 製作を断念したのであった。 いつかは本格的な ”機械の腕”を作ってみたい。 |
 |
箱外見 それから十数年、こんなキットが出ているではありませんか とりあえず作ってみたくなったので購入。 5500円と お値段も手ごろ。 |
 |
部品一覧 ロボットアームの部品一覧です。思ったほど部品数は多くない 写真では分からないが右半分の部品には台紙にそれぞれ番号が書いてあり間違えずに組めそうだ。 |
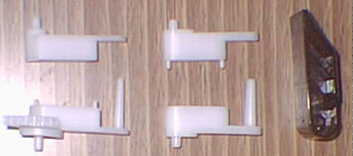 |
指の部分の部品 ベースとリンクで指先を挟み込む構造。 下がベース 上がリンク 右にある黒いのが指先になる部分。 |
 |
指の部分組み立てた状態 ベースには反対側の指を同期させるためのギヤと指を動かすためのラックギヤの取り付け穴が見える。 |
 |
ラックギヤ これを引いたり押したりして指を動かす。 |
 |
ラックギヤを組み付けた状態 穴に差し込んで完成。 |
 |
反対側の指の部分 ほとんど対称 ラックギヤの穴はない。 |
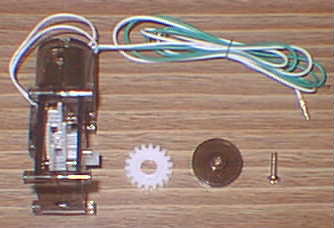 |
指を動かすモーターとクラッチ モーターには減速ギヤが初めから付いていた。 クラッチは過負荷が掛かった時に空回りするための物。 |
 |
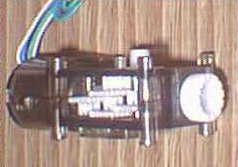
クラッチを取り付けた状態 ビスを締めすぎると過負荷が掛かった時に空回りしなくなるので注意。 |
 |
手のカバー クラッチの調整用の穴の有無に注意。 |
 |
手の組み立て モーターと指の部分をカバーに取り付ける。 だんだん ”ロボットの手” らしくなってきた。 |
 |
手の組み立て もう一方のカバーを付けて作動テスト。 モーターが空回りしているのでクラッチを調整。 動いた(ちょっと感動) |
 |
手首 ロータストッパ(左)とクラッチストッパ。 |
 |
手首の組み立て ロータストッパとクラッチストッパを手に取り付ける。 |
 フォアアームの組み立て フォアアームに手首からの配線を固定する。 |
|
 |
クラッチプレートとロックナット クラッチプレートは手首へ、ロックナットはひじの関節用。 |
 |
クラッチプレートの取り付け 手首にクラッチプレートを取り付ける。 |
 |
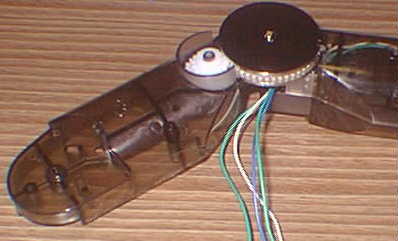
手首を動かすパワーユニット 右に見える白い部分がクラッチプレートにはまって手首を回す。 |

フォアアームの組み立て フォアアームにパワーユニットを組み付けて手首に固定する。 |
|

フォアアームの組み立て もう一方のフォアアームを取り付けて作動テスト。 ここまで順調だ。 |
|
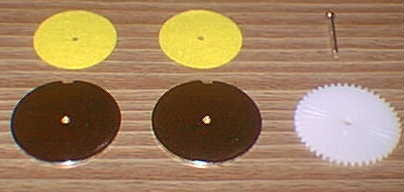
 ひじのクラッチ部品 ひじのクラッチ部品と組み立てた状態。 黄色いのはフェルト。黒いのは金属板で白いギヤをサンドイッチ状にして組み立てる。 | |
 |
アッパーアーム アッパーアームと中間ギヤ。 人間の腕で言うと、ひじから肩の部分だ。 |
 |
アッパーアームの組み付け フォアアームにクラッチとアッパーアームを組み付ける。 |
 |
スペーサ |
 |
スペーサの組み付け スペーサで中間ギヤとクラッチを押さえつける。 |
 |
アッパーアームの組み付け 裏返してアッパーアームに配線を固定する。 |
 |
ひじを動かすパワーユニット |
 |
アッパーアームの組み付け アッパーアームにパワーユニットを組み付ける。 |
 |
アッパーアームの組み付け カバーを付けて作動テスト。 後は、肩とベースそしてコントローラーだ。 |
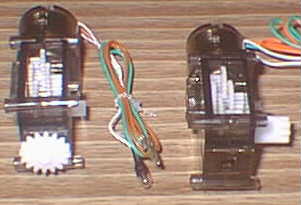 |
肩とベースのパワーユニット それぞれ付いているギヤが違う。 指を動かすモーターと全体を旋回させるモーターが外見状同じモーターに見えるが力の配分は大丈夫なのか? |
 |
アームベース(肩) ここに2つのパワーユニットが付く。 |
 |
アームベースの組み立て ベースのパワーユニット(旋回用)を取り付けたところ。 |
 |
アームベースの組み立て ベースのパワーユニット(肩用)の配線を通しておく。 |
 |
アームベースの組み立て ひじと同じようにクラッチ他を組み立てる。 |
 |
アームベースの組み立て パワーユニットとクラッチを取り付け、カバーをはめたら アームベース(肩)まで完成。 |
 |
電池ボックスと旋回ギヤ 電池ボックスが土台の役目を果たし、旋回ギヤはクラッチの機能つき。 |
 |
アームの完成 電池ボックスに旋回ギヤを乗せ旋回用のパワーユニットの歯車と噛み合う様にアームベースを取り付ける。 |
 |
ロボットアームの完成 コントロールボックスを組み立てて配線をし作動テスト 各関節の調整をしたら完成。 動かしてみた感想 指の開閉と手首の回転はまずまずで、 その他はスピードが思ったほど速くなかった(小さなモーターだから仕方ない) 一つだけ欲を言うと手首は回転するだけでなく曲がる機能があるとなお良かった。 実用面で見るとセンサーが搭載していない為コンピュータで制御するには精度不足だが 組み立てや制御を通してロボットの基本と運動機構の原理を学ぶのには良いキットだと思う。 |
ホーム