| 復活!JR-200 | |
 |
マシンの選択 なぜ 今頃JR-200なのかというと ロボットアームMR-999を動かすためには 5つのモーターを動かすためのソフトとインターフェースが必要で 専用のオプションは16000円と ちょっと高いので自作することにしました。 まず マシンはどれにするかということで ソフト、ハード共に資料が揃っていて パラレルのインターフェイスがある事が条件でした。候補に上がったのはJR-200とPC-8001mk2 んーーー で JR-200でやってみることとなりました。 |
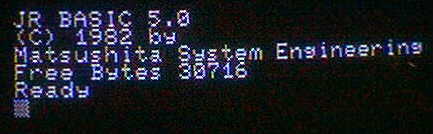 |
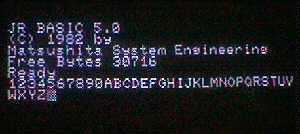
動け JR-200 配線をつなぎ恐る恐るスイッチを入れてみる。 左の写真がJR-200の起動画面。何もせずに復活かと思ったら かなりのキーが接触不良だ 強く押さないと反応しない。 まずは正常に動くようにすることが先決。 それにしても 1982年とか free bytes 30716 って時代を感じるね。 |
 |
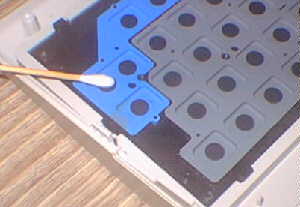
用意するもの キーボードの接触不良を直すのに用意するものは、ドライバー、クリーニング液、綿棒 の3点 正式にこれで良いのかは不明だが、昔はこれで良かったから多分良いんでしょう (笑) ここら辺がゴム製キーボードの良いところ |
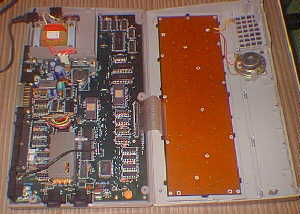 |
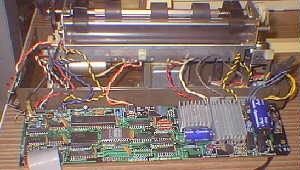
JR-200を開ける JR-200を開けたところ。問題のキーボードは右側の茶色い部分だ それにしても 良く見れば このサイズの中に RFコンバーターから電源まで収まっているのは驚きだ 電源トランスの手前にはオプションのRS-232Cインターフェイスがしっかり付いている。 |
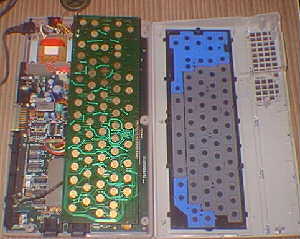 |
キーボードの基盤を外す 普通のキーボードの様にばねやスイッチなどは見当たらない。基盤の金属部分に通電性?のあるゴムが当たって キーが押されたことが分かるようになっている。 |
 |
ゴムと基盤のクリーニング それぞれの接触する部分をクリーニング液を付けた綿棒でクリーニングする。 |
 |
キーボードのテスト クリーニングが終了したら全てを組みなおして作動テスト ピッピッピッと音を立て全てのキーが軽いタッチで作動するようになった。 |
 |
デモンストレーションプログラム キーボードが直ったら次はある程度のプログラムを実行して内部が正常かテスト ここでは懐かしいデモンストレーションを実行してみる事にする。 ところが データレコーダーが見当たらない。身の回りの音楽関係は全てCDかMD さてどうしよう 物置を探して何とかテープレコーダーを発見。専用では無いので2400ボーはエラーでまくり 600ボーでトライすること10回目位でやっとload 成功 |
 |
デモンストレーション JR-200デモのオープニング画面 八神純子のミスターブルー(だったかな?)の曲に合わせて ビルの上からレーザー光線のような感じで空に JR-200 と書いていった 懐かしい |
 |
夜汽車 こちらは JR-100でもあったSLが画面を動くデモ JR-200は富士山をバックにBGMは線路は続くよどこまでもと この夜汽車だ これまた 懐かしい どうやら内部は正常のようだ。 |
 |
プリンター JR-P01 本体の次は プログラムリストを取るためのプリンター。写真はJR‐100用の物だがJR-200へは直接接続できる事実上純正品。 けたたましい音と共に毎秒30文字の印字スピードのドットインパクトプリンターだ。 |
 |
プリンター エラー とりあえず電源を入れてみる。 「ガーン」 電源ランプと共にエラーランプ点灯 JR-200につないだりしてみたが うんともすんとも言わない 間違いなく故障している。 一応分解してみることにする。(プリンターは分解の経験がないのでちょっと不安) |
 |
プリンターの分解 分解してみたが 断線、コネクターの緩み 外れ等は確認できなかった 素人が直せる故障ではない事が確定した。 さようなら JR-P01 ご臨終です。 |
 |
プリンター SORD PT-5 次のプリンターはPC-8001mk2で使っていた SORDのサーマルプリンター PT-5。 このプリンターは静かでいいのだが 感熱紙しか使えないのが欠点。 キチンと動いたらFAX用紙でも買ってきますか・・・ LISTだけならこれでもOK ってゆうか これ LISTを取るぐらいしか使い道ねーじゃん |
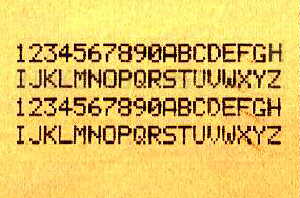 |
SORD PT-5 印字結果 こちらは接続したら一発で動きました。中に入っていた感熱紙はかなり黄ばんでいましたが 文字の判別は可能。LISTも取れるようになった。 これでJR-200の基本部分が復活した。 |
 |
インターフェースボード 本体が復活したら次はロボットアームを動かすためのインターフェースだ。 写真のものは、パラレルの入出力各16ビット、64キロビットのメモリー付きですが、今回使うのは出力16ビットの内 10ビットのみ。(当然どこにも売っていませんので自作です。裏の配線がへたくそですね) 下に見える50ピンのフラットケーブルをJR-200の外部バス端子に接続 横のコネクタから出力を取り出すんだが ここからはロボットアーム用に 回路を組まなくてはならない。それより このインターフェースボード作動するのか? 作ってから15年以上経ってるぞ! |
ホーム